I connect both motors to the controller board and wrote a simple program to manage them. Now the controller board rotate the motors to the coordinates, that specified in the control program. Later, the controller will take the coordinates from a connected PC.
Monday, 20 January 2014
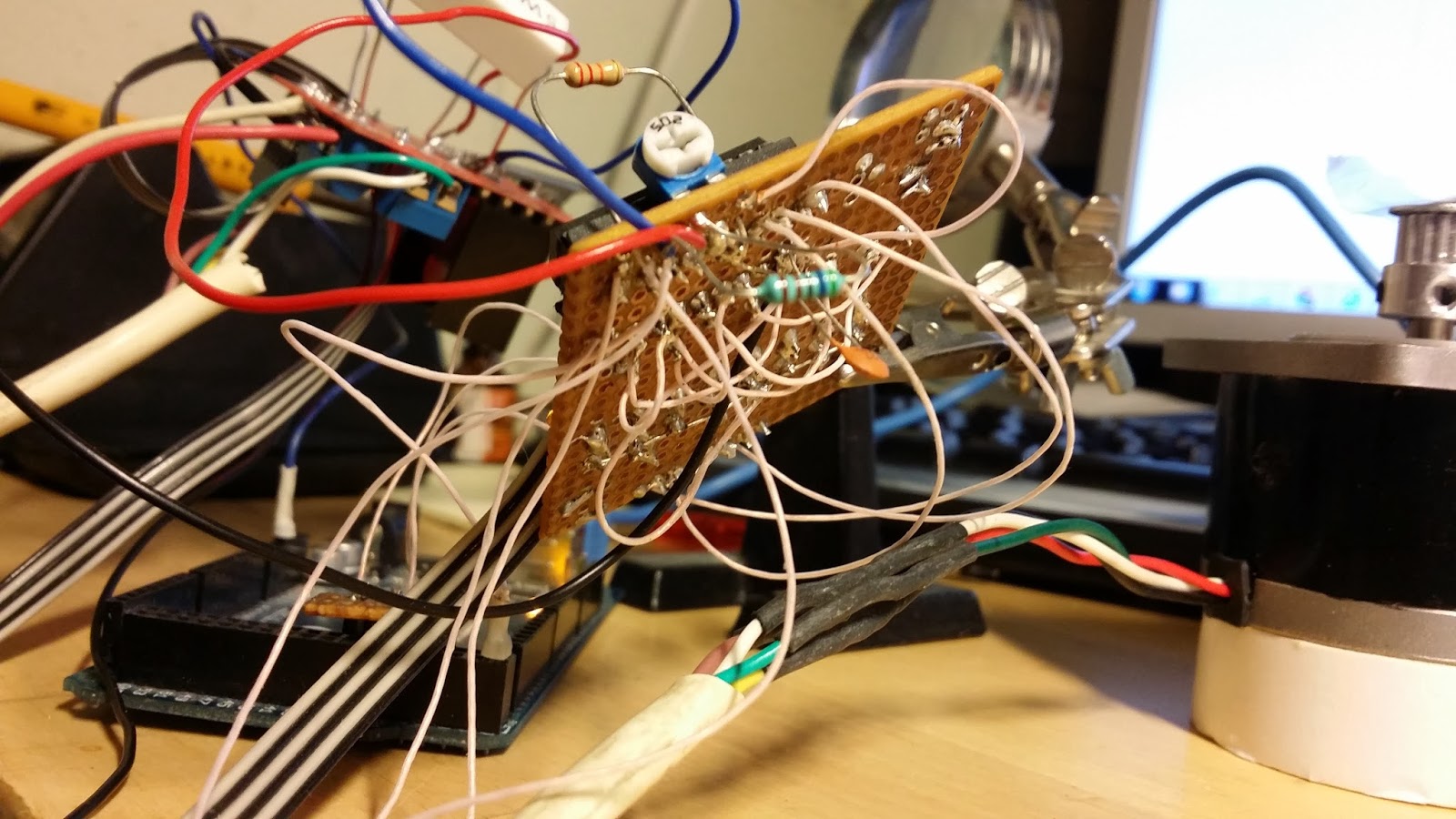
Quick report 3
A long time I did not add the news to the blog, but during this time a lot has been done.
I propose a quick overview of what is already done.

The controller board is fully assembled and is now being actively writing and testing the software part for controller and PC.
Thursday, 9 January 2014
Printed circuit board. Part 2
And so, the PCB pattern is ready, tested and now need to move it to the board.

Need to disable all image optimization, toner saving in a laser printer and then, print sample on an normal sheet.
Wednesday, 8 January 2014
Printed circuit board. Part 1
Yesterday evening drew the first version of the PCB. Maybe today I will begin to produce its. Description below.
How it will look:

How it will look:
Sunday, 5 January 2014
Quick report 2 + Video
To begin with - I repaired my soldering iron but will order a new later. I builded a test version of stepper motor driver. Photos and video below.

It looks awful and complicated :)
Subscribe to:
Comments (Atom)